HexArth

HexArth is a biomimetic hexapod robot with 18 degrees of freedom, equipped with 18 high-torque servos (30kg.cm each). It features a reliable structure, flexible movement, a 9-axis motion tracker, and open-source cross-platform Web applications for controlling the robot. You can access the robot's control interface from any device (phone or computer) with a Chromium-based browser. Using an ESP32 as the lower computer for inverse kinematics and gait generation offloads computational tasks from the host computer. A Raspberry Pi can be installed as the upper computer for high-level decision making.
| SKU | Product |
|---|---|
| 34040 | HexArth (US) |
| 34022 | HexArth (EU) |
| 34023 | HexArth (UK) |
Features
- 18 degrees of freedom for more flexible and varied movements.
- ICM20948 9-axis motion tracker, supports self-balancing mode.
- 30kg.cm high-torque servos (stall torque up to 30kg.cm), offering strong expandability.
- Structural parts made of 5052 aluminum alloy and PA12 nylon, solid and reliable.
- Integrated multiple interaction devices, including a 0.96inch OLED screen, two RGB-LED indicators, etc.
- Example code developed with Arduino IDE; no manual compiler environment configuration needed. The ESP32 automatically creates a Wi-Fi hotspot on boot. You can connect and log into the control page using a phone (Android/iOS) or computer (Linux/Windows/Mac) without needing to download an app — just a Chromium-based browser.
- Comes with a charging interface and automatic download circuit, allowing use while charging.
- Six 18650 batteries with 4000mAh large capacity, providing higher output current and stronger servo power.
- Battery protection circuit with overcharge, over-discharge, overcurrent, and short circuit protection.
- Onboard INA219 acquisition chip for real-time monitoring of battery voltage and charging current.
- A Raspberry Pi can be installed as the upper computer to communicate with the lower computer via serial port. The ESP32 as the lower computer handles much of the inverse kinematics and gait generation, leaving more resources on the Raspberry Pi for advanced functions.
- Open-source STEP models for easy secondary development.
- Most configuration settings can be done via JSON commands, e.g., configuring Wi-Fi without a USB cable.
- All code is open source, with rich development documentation and tutorials.
Product Hardware Introduction
Lower Computer Driver Board Onboard Interfaces
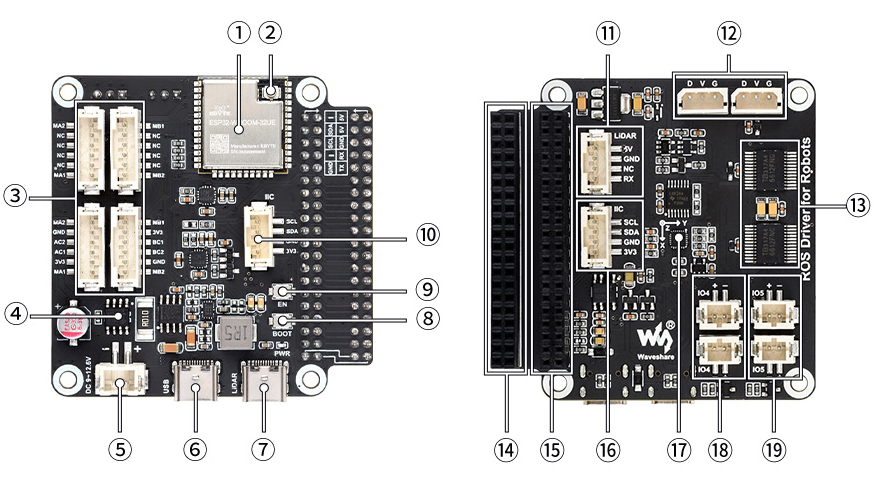
- ESP32 sub controller module
- ESP32 module antenna header
- Motor control headers
- INA29 (Battery voltage detection IC)
- Power supply interface
- USB communication/download port
- Radar USB port
- ESP32-IO0 button
- ESP32-EN button
- I2C device header
- Lidar UART headers
- Bus servo control headers
- TB6612FNC (Motor driver IC)
- Host controller 40PIN extended header
- Host controller connection header
- I2C device headers
- ICM20948 (9-axis IMU attitude sensor)
- 12V switch controlled by ESP32-IO4
- 12V switch controlled by ESP32-IO5
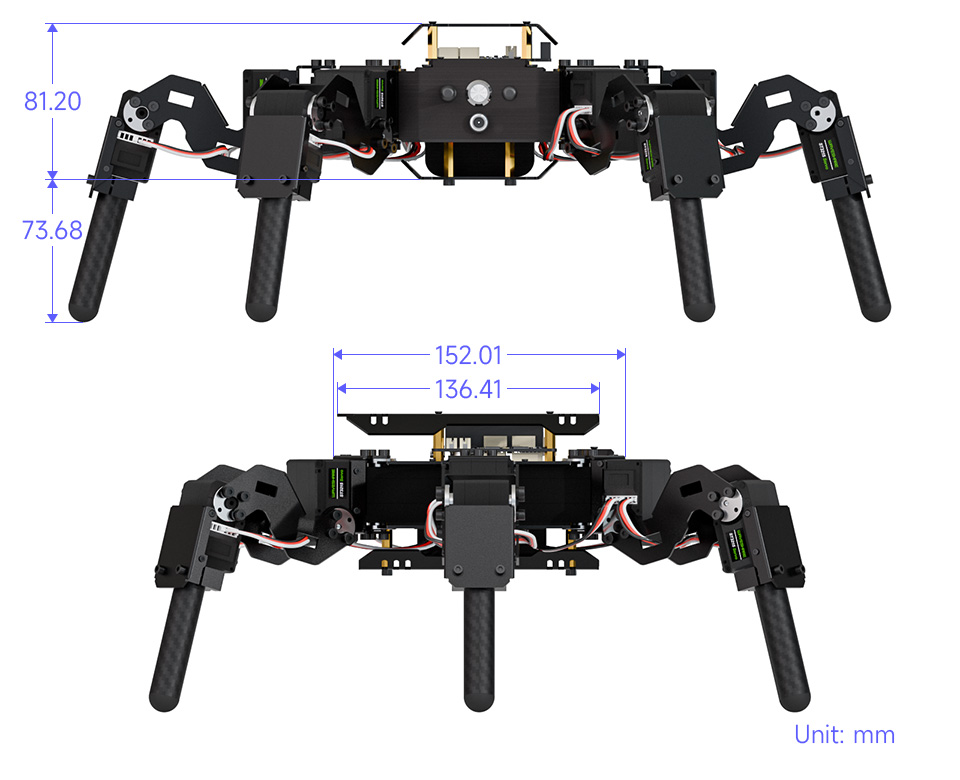
Dimensions