Working with MicroPython
This chapter includes the following sections, please read as needed:
MicroPython Getting Started Tutorials
New to Pico MicroPython development and want to get started quickly? We have prepared a general introductory tutorial for you. These tutorial is designed to help developers quickly become familiar with Thonny IDE and start developing. The content covers environment setup, project creation, component usage, and peripheral programming, helping you take the first step in MicroPython programming.
- Section 1 Basic Introduction
- Section 2 GPIO
- Section 3 PWM
- Section 4 ADC
- Section 5 UART
- Section 6 I2C
- Section 7 SPI
- Section 8 PIO
Setting Up Development Environment
Please refer to the Install and Configure Thonny IDE Tutorial to download and install the Thonny IDE.
Example
The Micropython demos are located in the Micropython directory of the example package.
| Demo | Basic Program Description | Dependency Library |
|---|---|---|
| 01_SD | Mount TF card | - |
| 02_RTC | Get RTC data | - |
| 03_IMU | Get six-axis sensor data | - |
| 04_GPS_UART | Communicate with GPS module using UART to get GPS data | - |
01_SD
Description
- Uses SPI to communicate with the TF card and mounts the TF card to the development board. After successful mounting, you can view and modify the contents of the TF card via Thonny.
Hardware Connection
- Insert a TF card
- Connect the board to the computer using a USB cable
Code Analysis
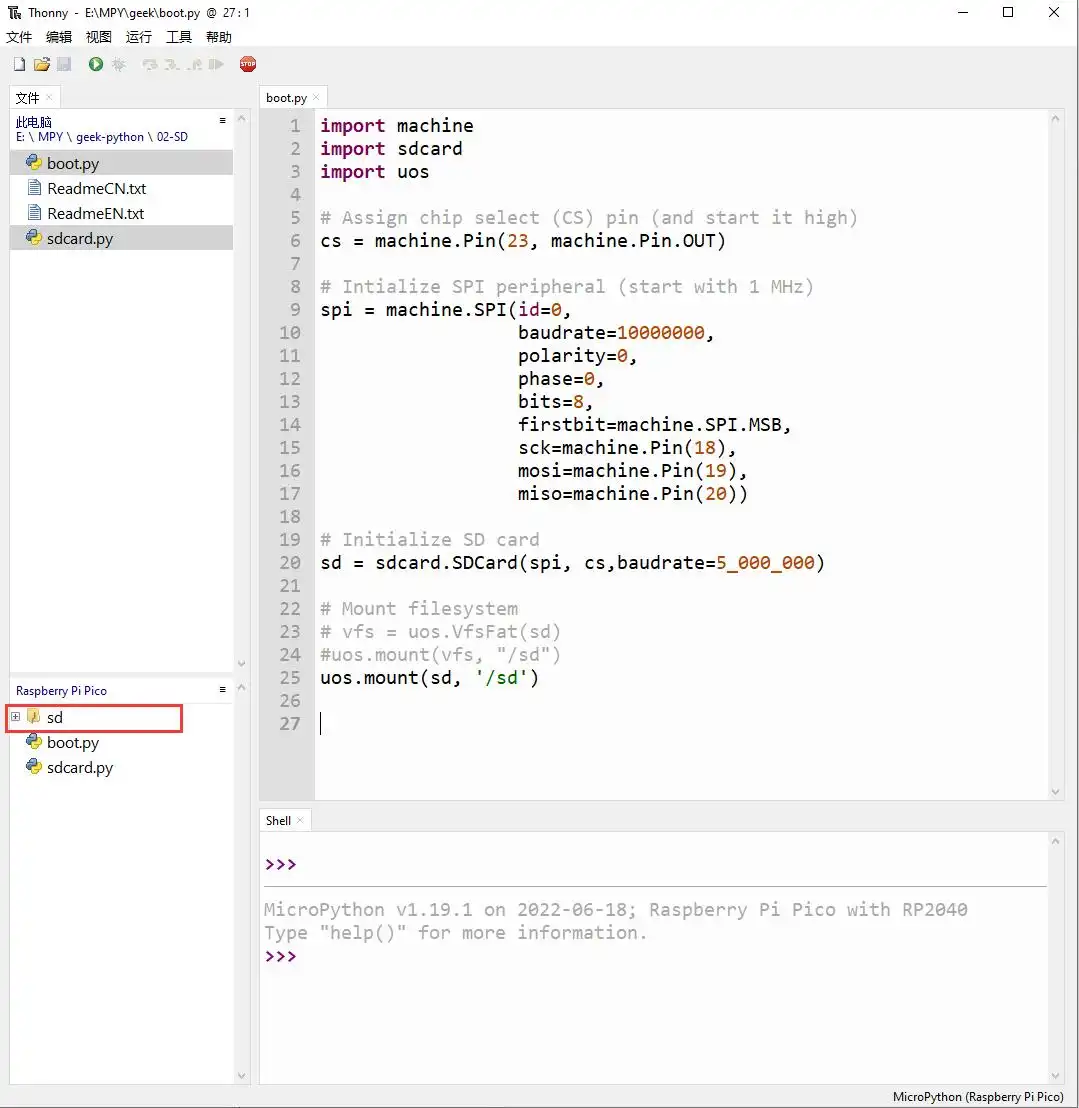
sdcard.SDCard(spi, cs, baudrate): Creates a TF card object and binds the initialized SPI interface and CS pin to the TF card driver.uos.mount(sd, '/sd'): Mounts the TF card file system to the/sddirectory. After successful mounting, users can perform file read/write operations on the TF card via the/sdpath, such as creating, reading, or deleting files.
Operation Result
-
Upload all py files from the 01_SD folder to the development board via Thonny and reset the board. After resetting, the development board will automatically mount the TF card to the sd directory according to the boot.py program.
02_RTC
Description
- Uses I2C to communicate with the onboard RTC chip, sets and reads RTC time data, and tests if the RTC interrupt is functioning correctly.
Hardware Connection
- Connect the board to the computer using a USB cable
Code Analysis
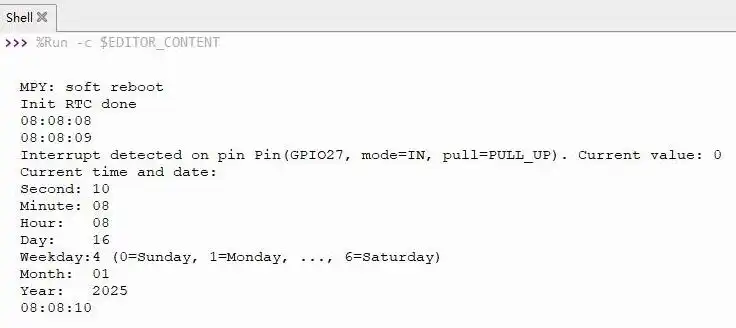
RTC = PCF85063(): Creates an RTC object.RTC.setDate(weekday, day, month, year): Sets the RTC date.RTC.setTime(hour, minute, second): Sets the RTC time.RTC.readTime(): Reads the RTC time.RTC.setAlarm(second, minute, hour, day, weekday): Sets the RTC alarm.RTC.enableAlarm(): Enables the RTC alarm.
Operation Result
-
Run the py files in the 02_RTC folder using Thonny.
03_IMU
Description
- Uses I2C to communicate with the onboard six-axis sensor and reads the sensor data.
Hardware Connection
- Connect the board to the computer using a USB cable
Code Analysis
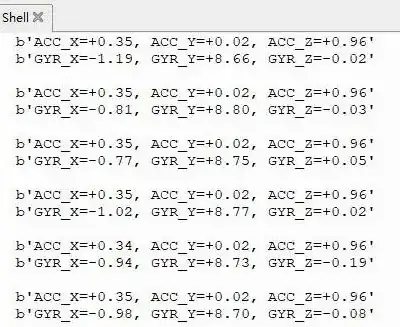
IMU = QMI8658(): Creates an IMU object.IMU.Read_XYZ(): Reads the six-axis sensor data.
Operation Result
-
Run the py files in the 03_IMU folder using Thonny.
04_GPS_UART
Description
- Uses UART to communicate with the onboard GPS and queries the LC76G for NMEA data.
Hardware Connection
- Connect the GNSS ceramic antenna
- Connect the board to the computer using a USB cable
Code Analysis
gnss_l76b=l76x.L76X(): Creates a GPS object.gnss_l76b.l76x_send_command(): Sends initialization commands.gnss_l76b.uart_any(): Checks if there is data in the UART buffer.gnss_l76b.uart_receive_byte(): Receives UART data.
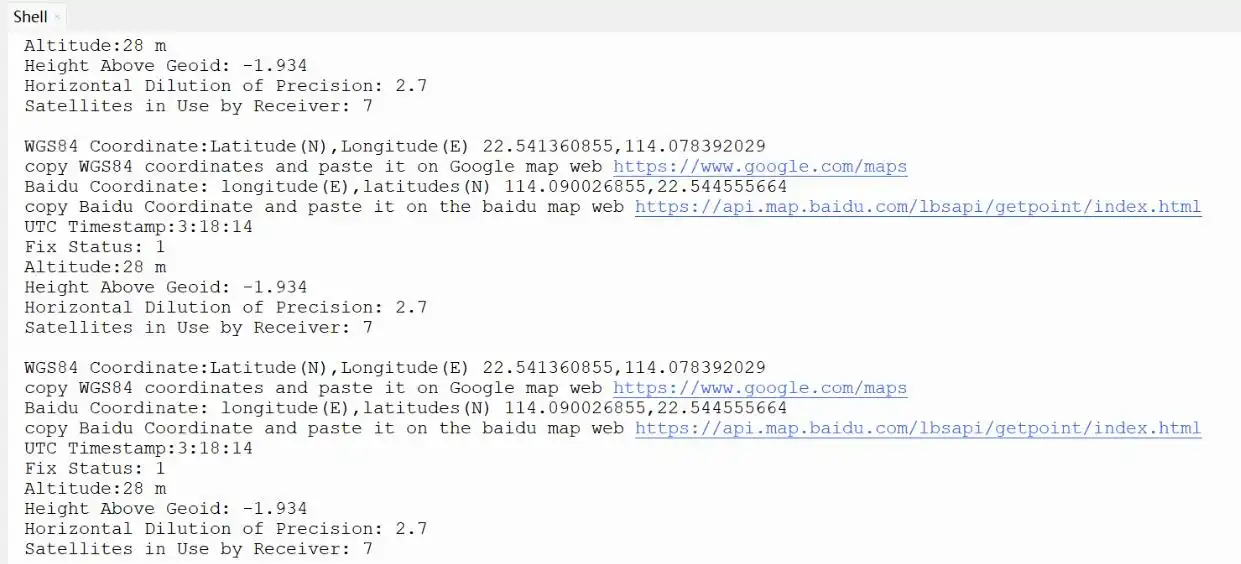
Operation Result
-
Upload all directories and files from the 04_GPS_UART folder to the development board using Thonny, then run the
coordinates_converted.pyfile in the example folder.