Section 2 Basics
This section will guide you to further understand MicroPython and become familiar with the usage of the Thonny IDE.
The core logic of this tutorial applies to all ESP32 development boards. However, all operational steps are explained using the Waveshare ESP32-S3-Zero Mini Development Board as an example. If you are using a different model of development board, please modify the relevant settings according to your actual situation.
1. Thonny File View
In embedded development, it's often necessary to transfer and manage files between the "local computer" and the "ESP32 device". Thonny provides a visual file view function to accomplish this.
-
Open the file view: Open Thonny, select
View->Filesfrom the top menu bar.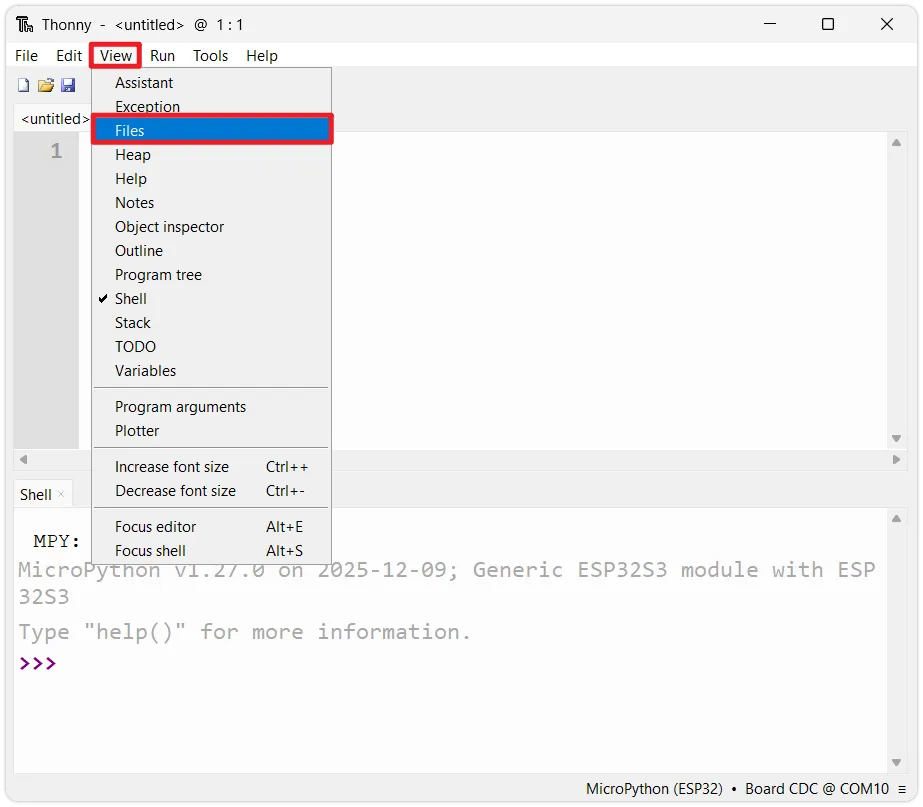
-
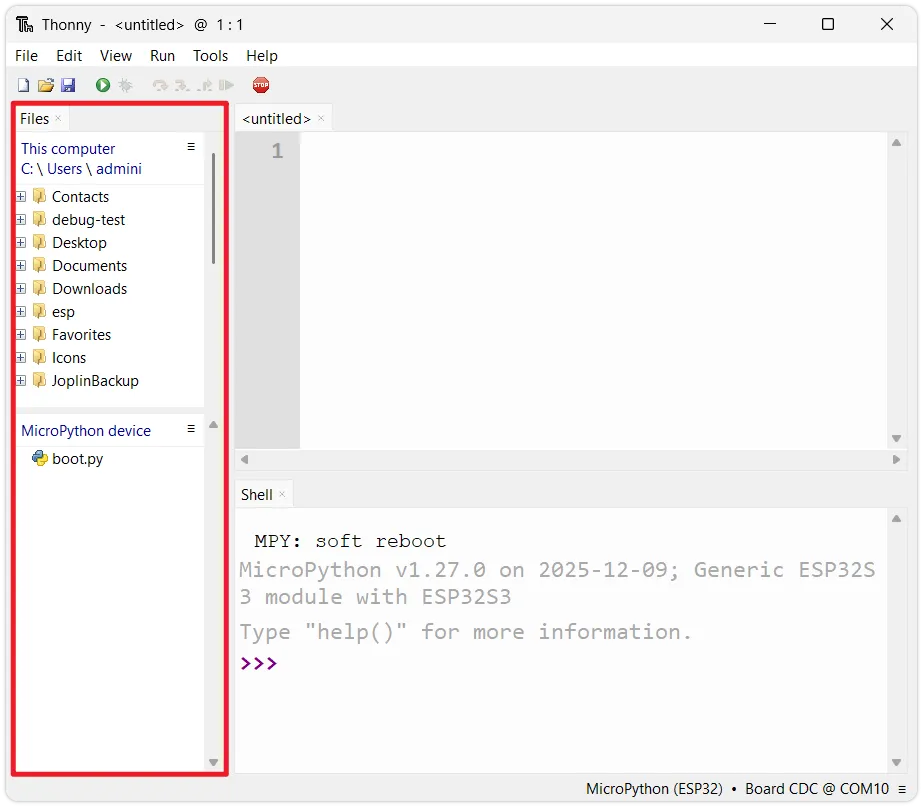
Interface layout: The left sidebar will now show two areas:
-
Top section (Local Files): Displays files stored locally on your computer.
-
Bottom section (MicroPython device): Displays files in the ESP32's internal storage.
Initial FilesOn a newly flashed ESP32, there is usually a file named
boot.py. This is a system-generated boot script.
-
2. Two Modes of Code Execution
MicroPython offers two different ways to run code: interactive execution (REPL) and script execution.
2.1 Interactive Execution (REPL)
REPL (Read-Eval-Print Loop) allows users to directly input code in the Shell window at the bottom of the Thonny interface. Pressing Enter executes it immediately.
- Characteristics: Immediate feedback on execution results.
- Applicable scenarios: Testing short commands, querying variable values, checking hardware connection status (e.g., scanning I2C device addresses).
- Disadvantage: The entered code cannot be saved; it is lost when the device loses power or is restarted.
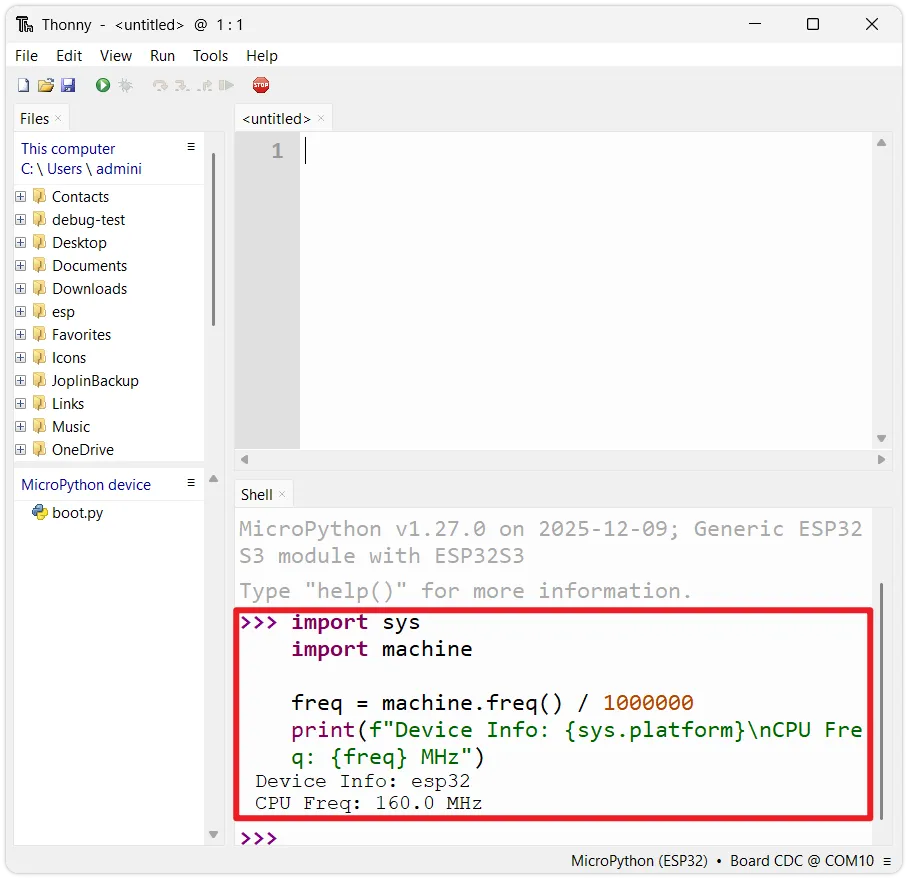
Copy the following code into the Shell window, or type it line by line and press Enter:
import sys
import machine
freq = machine.freq() / 1000000
print(f"Device Info: {sys.platform}\nCPU Freq: {freq} MHz")
The Shell window will output the platform name of the current device and the operating frequency of the CPU.
2.2 Script Execution
Script execution is the standard way to develop complex programs. It involves writing complete code files in the editor area, saving them, and then sending them to the ESP32 for execution.
-
Write the code: Enter the following test code in the editor. This program prints device information and outputs an increasing count every second.
import sysimport machineimport time# Get and print CPU frequency (converted to MHz)freq = machine.freq() / 1000000print(f"Device Info: {sys.platform}\nCPU Freq: {freq} MHz")count = 0while True:# Print the current count valueprint(f"Hello World! {count}")count += 1# Delay for 1 secondtime.sleep(1) -
Run the script: Click the green
Runbutton on the toolbar (or press F5).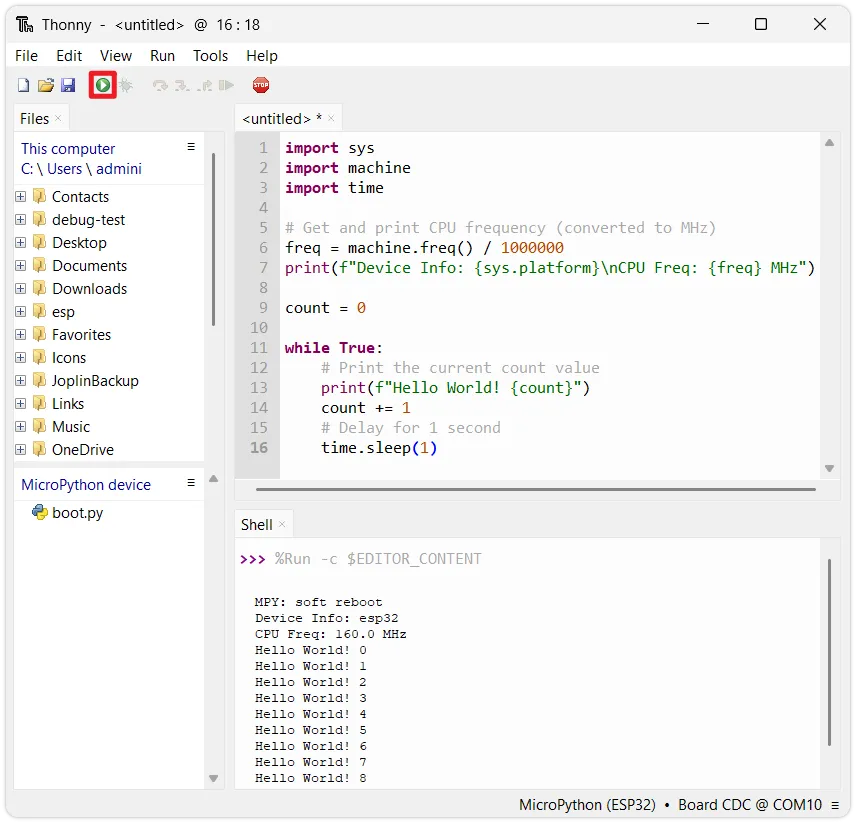
-
Observe the output: The Shell window at the bottom will start outputting device information and the loop count.
How to stop the program?Since the code above contains a
while Trueinfinite loop, the Shell will be occupied, preventing other operations like saving files. To stop the program, click the red Stop button on the toolbar, or press Ctrl + C in the Shell.
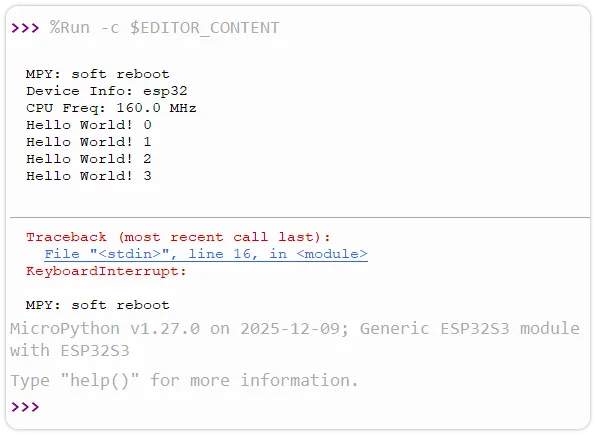
Forcibly interrupting may cause the Shell to throw a
KeyboardInterrupterror. To implement more robust exit handling, you can wrap the main logic in a try-except structure to catch the exception:import sysimport machineimport time# Get and print CPU frequency (converted to MHz)freq = machine.freq() / 1000000print(f"Device Info: {sys.platform}\nCPU Freq: {freq} MHz")count = 0try:while True:# Print the current count valueprint(f"Hello World! {count}")count += 1# Delay for 1 secondtime.sleep(1)except KeyboardInterrupt:# This block executes when a keyboard interrupt (CTRL+C) is detectedprint("Exit") -
Save the code: Save the code to the ESP32 for later use.
-
Stop the program, then click the
Savebutton on the toolbar (or press Ctrl + S).
-
The system will prompt you to choose a save location. Select MicroPython device.

-
Then enter a filename (e.g.,
test_print.py) and click OK.
-
After saving, you can see
test_print.pyin the MicroPython device area of the left file view.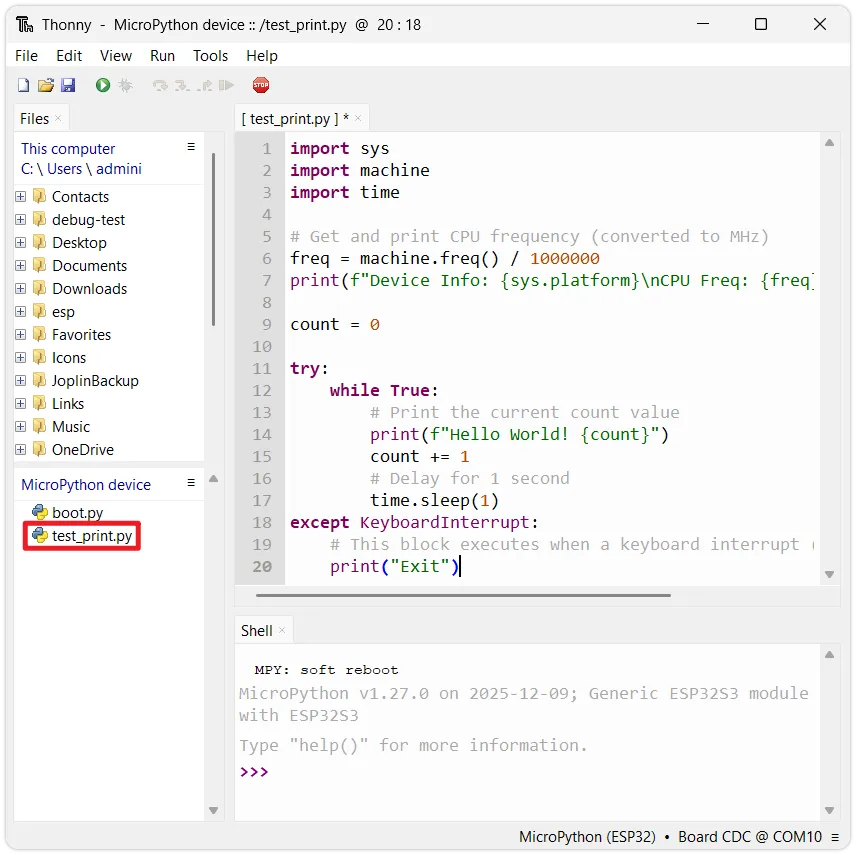
-
3. ESP32 Boot Mechanism
In the previous step, although the code was saved to the device, the program does not run automatically after unplugging the USB cable and powering it back on. This is determined by MicroPython's boot rules. After the ESP32 powers on and resets, it goes through the following stages:

3.1 boot.py (Boot Script)
- Priority: Runs after system startup.
- Purpose:Typically used to configure system underlying parameters, such as configuring USB connection mode, establishing network connections, etc.
- Advice: It is recommended for beginners to keep the default settings. Modifying it arbitrarily may prevent the system from booting.
3.2 main.py (Main Program)
- Priority: Runs after
boot.pyfinishes execution. - Purpose: Stores the user's application code.
- Key Point: Only a file named
main.pywill run automatically on power-up. Scripts with other names (liketest_print.py) are stored as ordinary files and will not execute automatically.
3.3 Interactive Interpreter (REPL)
If main.py is not found, or if main.py finishes execution, MicroPython will enter interactive interpreter mode (REPL).
-
Global variables set in
boot.pyandmain.pywill still be valid in the REPL. -
The REPL will continue until a hard or soft reset is triggered.
4 Example: Auto-running Script
If you want the program to run automatically in an offline state (connected only to battery or power supply), you need to name the script main.py.
-
Locate the file: In the
MicroPython devicearea at the bottom left of Thonny, double-click to open thetest_print.pysaved in the previous step. -
Save as main.py: Click
File-Save copyin Thonny's menu bar, choose to save to theMicroPython device, and set the filename tomain.py.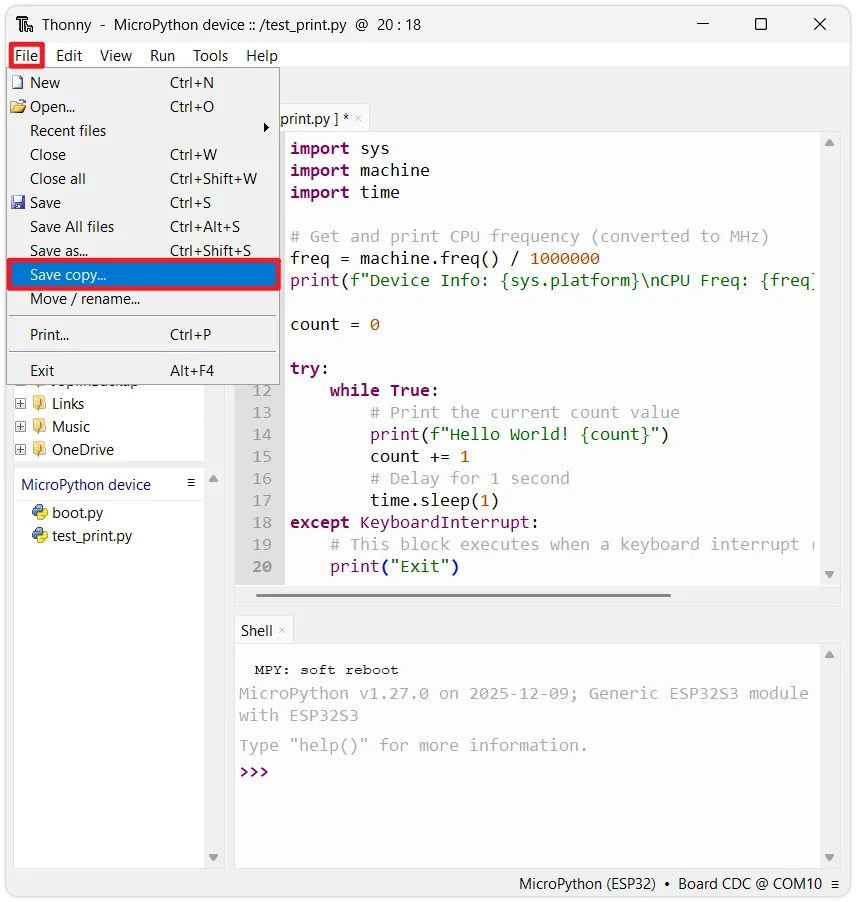

-
Verify: Press Ctrl + D (soft reboot) in the Shell window to verify if
main.pyruns automatically after the device restarts.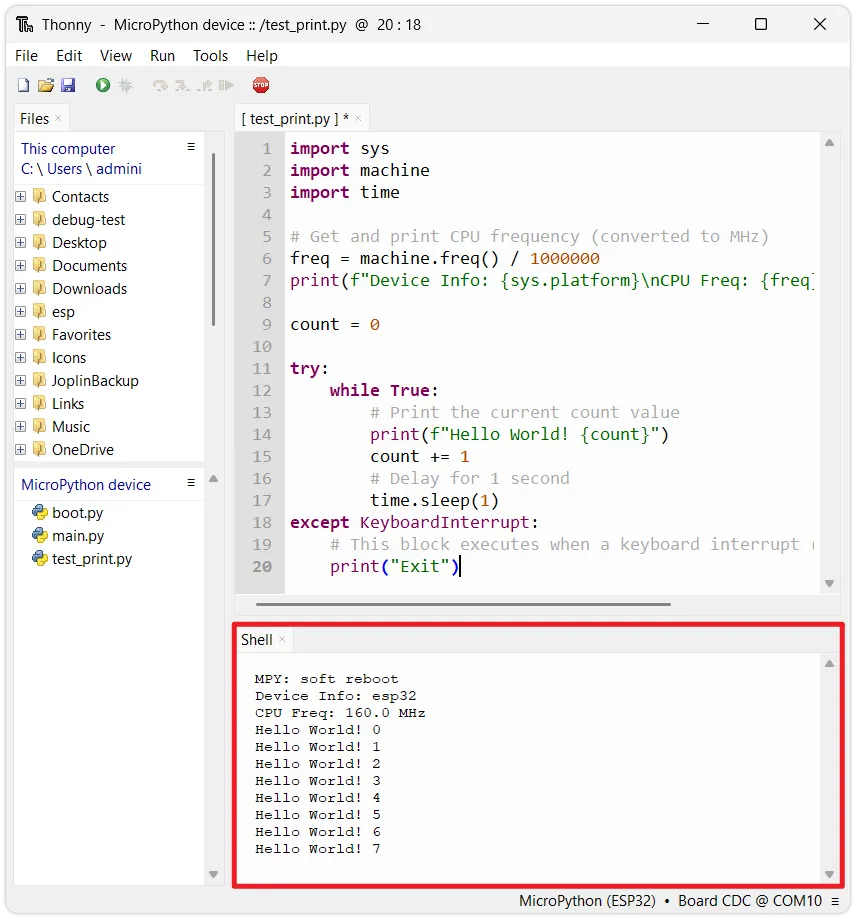 Why press Ctrl+D?
Why press Ctrl+D?When Thonny establishes a connection with the ESP32, it sends an interrupt signal by default, stopping the currently running program and entering REPL mode. (This behavior can be changed in the settings.)
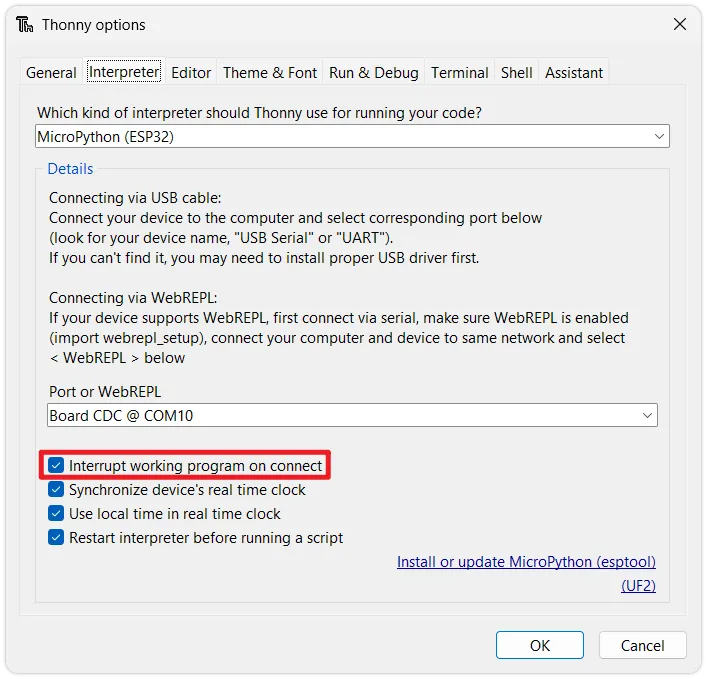
This means that even if the ESP32 automatically runs
main.pyon power-up, the program stops immediately once connected by Thonny, resulting in no output in the Shell window.Pressing Ctrl + D (soft reset) in the REPL restarts the MicroPython interpreter while keeping the Thonny connection, allowing you to observe the full startup execution of
main.pyin the Shell window.
5. Uploading Files
During development, when you need to use external driver libraries (e.g., for an OLED screen or a temperature/humidity sensor), you typically need to use external library files (.py files).
To transfer a file from your computer to the ESP32, follow these steps:
-
Locate the target file (e.g.,
ssd1327.py) in the top-left section (Local files). -
Right-click the file and select
Upload to /.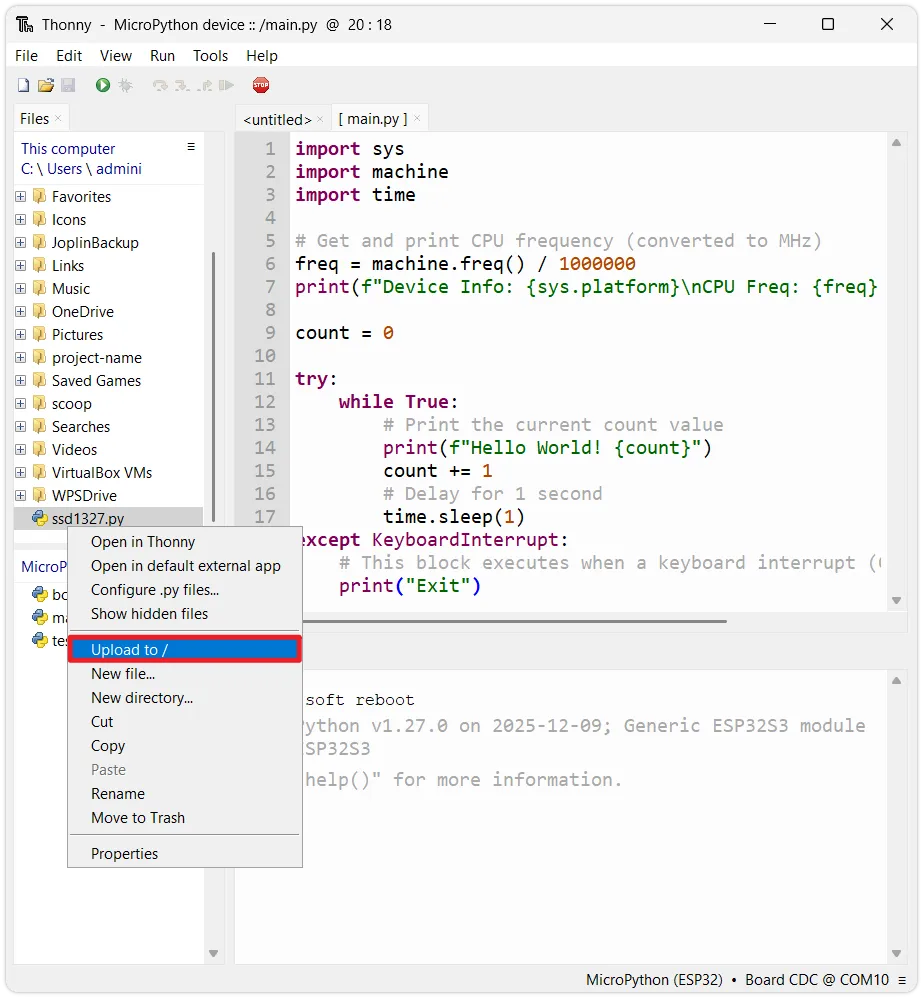
-
The file will be copied to the ESP32's file system. You can then use it in your code via
import ssd1327.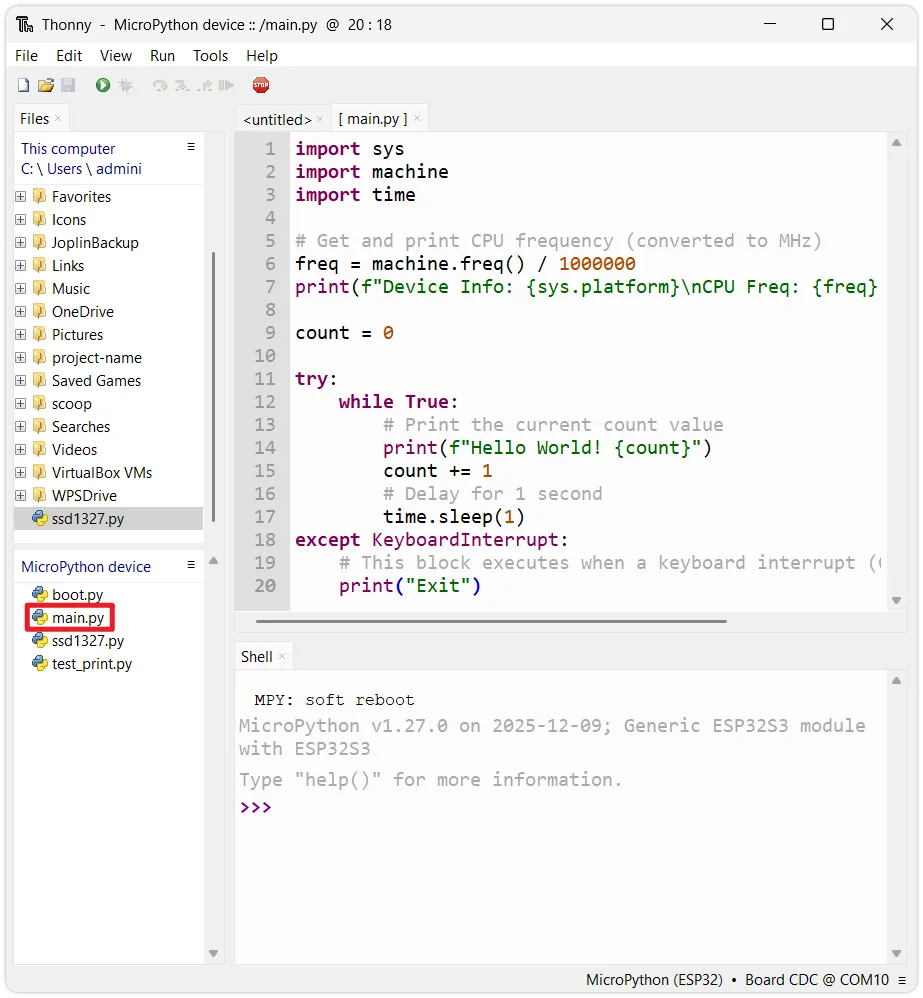
6. Overview of Common Built-in Modules
MicroPython provides a series of hardware-related built-in modules on the ESP32. Here is a brief overview of commonly used modules:
6.1 machine Module
The machine module provides interfaces to access underlying hardware and is the core module for controlling peripherals:
machine.Pin: Controls GPIO input/output.machine.ADC: Acquires analog signals.machine.PWM: Outputs PWM signals.machine.UART: Serial port communication.machine.I2C: I2C bus.machine.SPI: SPI bus.machine.Timer: Timer.machine.RTC: Real-time clock.
For example, check the current CPU frequency in the REPL:
import machine
print(machine.freq()) # View CPU clock frequency
6.2 time / utime Module
The time module (called utime in some firmware versions) provides delay and time counting functions:
import time
time.sleep(1) # Delay 1 second
time.sleep_ms(500) # Delay 500 milliseconds
time.sleep_us(100) # Delay 100 microseconds
print(time.ticks_ms()) # Returns millisecond count since power-on
6.3 network and bluetooth Modules
The network and bluetooth modules are used to configure Wi-Fi and Bluetooth functions, providing wireless connectivity for the ESP32. You can view the interfaces included in a module with the following command:
import network, bluetooth
help(network)
help(bluetooth)
6.4 Viewing Available Modules and Help
The built-in modules supported vary slightly between different firmware versions or chips. You can query the current device's support in the following ways:
-
List all built-in modules of the current firmware:
Enter in the Shell:
help('modules') -
Query module attributes and functions:
Use the
dir()function to list all attributes of an object. For example, to see what's under themachinemodule:import machinedir(machine) -
View object help documentation:
MicroPython's
help()function provides a brief description of a specific object:import machinehelp(machine.Pin)notehelp()provides only a brief description. For complete API definitions, please refer to the official documentation.